规格书下载
规格书下载

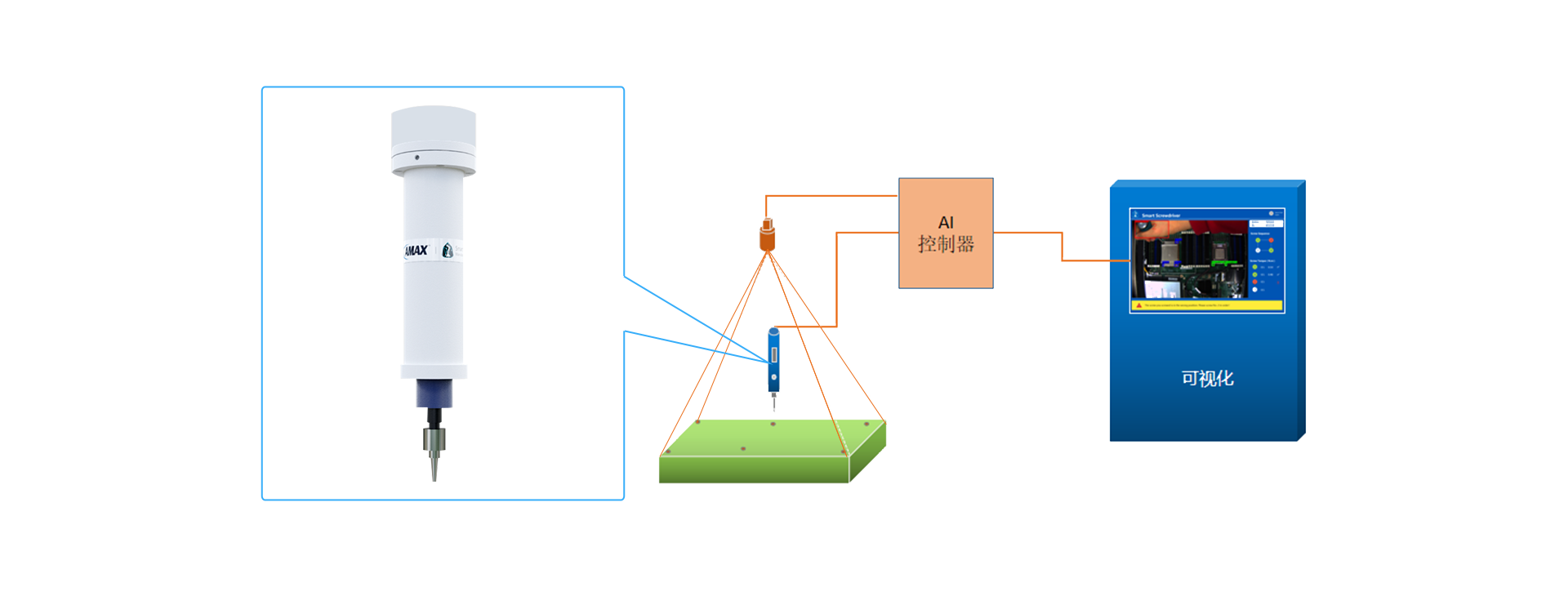
在操作区域上方安装或佩戴可穿戴摄像头,摄像头会不断采集操作的视觉图像,并传输到人工智能终端,人工智能模块会对接收到的图像进行螺丝型号和位置的识别;如果发现当前螺丝型号或位置错误,则会进行智能预警,显示无效扭矩输出和警告信息;用户必须进行调整后才能继续操作。

通过一定算法对电机转矩进行估算,计算出较为准确的电机当前转矩,对转矩进行闭环控制,动态扭矩传感器集成在螺丝刀的底部,用于收集操作过程中的输出扭矩值。采集的扭矩值与设定值实时比较,一旦超过设定值,电机功率输出会关闭,数字显示屏会发出报警信号,并在系统中显示错误信息。用户根据提示信息,松开螺丝并重新拧紧。

本产品采用人工智能技术,用户可以通过系统根据MPI需求远程定义作业内容,远程配置螺丝刀的参数,远程监控螺丝刀的运行情况,并分析运行数据,从而促进产品的质量控制。通过打通软件和硬件之间的壁垒,让两者更快融合,从而节省人力和时间,提升企业的工作效率。

通过扭矩传感器对螺丝刀的扭力进行校验,根据转矩控制的历史数据和闭环对比数据,及时监测转矩环的误差精度;一旦控制精度超过要求会进行智能预警,提示用户校准扭矩。用户将螺丝刀固定在指定螺丝上,螺丝刀会自动进行精度校准,提高了工作效率,也节省了人力。

基于工业物联网的场景设计,使用MQTT与MES系统进行数据传输;通过对设备数据的采集、分析实时掌握的最新数据,进行数据分析,实现对工作任务进行过程化和规范化的管理;从而大幅提高制造效率,改善产品质量,降低产品成本和资源消耗,最终实现将传统工业提升到智能化的新阶段。


| 功能 | Lite版 | 旗舰版 | 机械臂版 | 自动进料板 | 超级版 |
| 作业顺序视觉防呆 | √ | √ | √ | √ | √ |
| 软件设定扭力 | √ | √ | √ | √ | √ |
| 状态信号灯 | √ | √ | √ | √ | √ |
| 作业顺序编排 | √ | √ | √ | √ | √ |
| 作业可视化软件 | √ | √ | √ | √ | √ |
| 螺丝刀支架 | √ | √ | √ | √ | √ |
| 自动校准 | √ | √ | √ | √ | √ |
| 扭力测试仪 | √ | √ | √ | √ | √ |
| 物联网接入 | √ | √ | √ | √ | √ |
| MES系统集成 | √ | √ | √ | √ | √ |
| 校准提醒 | √ | √ | √ | √ | |
| 扭力闭环控制 | √ | √ | √ | √ | |
| 多轴机械臂 | √ | √ | √ | ||
| 自动进料机 | √ | √ | |||
| 机械臂视觉定位 | √ |
 功耗规格
功耗规格
总功率:150w
输入电压:24V/DC
控制箱尺寸
宽x高x厚:0.25m*0.4m*0.15m
AIO规格
长X宽x厚:55cm*32cm*8cm
屏幕:24寸电阻屏
AI控制单元
相机:工业相机600W像素
AI控制器:嵌入式GPU
接口
网络接口:RJ45
相机接口:USB3.1
电源连接端子:XT90 2pin
扭力传感器端子:PHB 4pin
电机端子:PHB 9pin
网络交换机:1Gbps 5-port
限位LED端子:PHB 4pin
工作温度
工作温度:0-60°C
螺丝刀规格
高:45cm
重量:450g
批头:1/4寸
夹具: JT0
扭力范围: 0.3~1.0 N.m
直径: 4.5cm
外壳材质: PLA
支架格高度: 110cm
臂长: 60cm